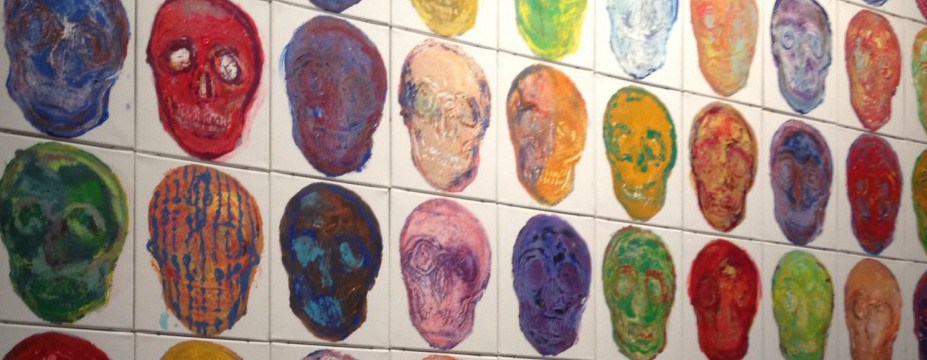
La paréidolie est la tendance du cerveau à créer du sens par l’assimilation de formes aléatoires à des formes référencées. Par exemple, l’humain a tendance à deviner un visage dans un nuage ou une tache. Alexander Mordvintsev, Christopher Olah et Mike Tyka ont créé le programme Google Deep Dream, basé sur les réseaux neuronaux éduqués à reconnaître des formes : ils lui ont demandé d’optimiser les photos qu’il analysait suivant ses propres règles. Le résultat de chaque photographie travaillée est une interprétation originale qui n’a aucun référentiel humain. Continuer la lecture de Différence artificielle
Tous les articles par brunobonnell
Épilogue de la série SINGULARITÉ : en route vers la Robomanité !
Après de multiples (10 puissance 19.345.734.971 ) tentatives de compréhension du comportement humain au travers de l’analyse syntaxique, sémantique, structurelle et comparative de textes, photos, films, fichiers, archives, objets et tout autre élément susceptible de donner des informations tangibles, et en utilisant les algorithmes neuronaux de dernière génération, nous n’avons pas pu corréler assez de données pour rationaliser leurs attitudes. Continuer la lecture de Épilogue de la série SINGULARITÉ : en route vers la Robomanité !

Etre ou ne pas être artificiel
Rabelais n’envisageait pas, en décrivant la science sans conscience comme une ruine de l’âme, qu’il faudrait le prendre à la lettre à l’heure de la robotique. En effet, si les mécatroniciens rivalisent chaque jour de prouesse pour sophistiquer les performances scientifiques des automates, seule la compréhension des paramètres du monde réel, forme de conscience, définit le statut d’un robot. Continuer la lecture de Etre ou ne pas être artificiel

Oceano robo
28 ans quasiment jour pour jour après le petit pas de Neil Amstrong sur la lune, le 4 juillet 1997, le robot Pathfinder roule pour la première fois sur Mars et confirme que piéton de l’espace n’est probablement pas un métier d’avenir…. En mars 2011, un robot humanoïde sans jambes de 136 kg doté de deux bras, de mains et d’une multitude de capteurs embarque à bord d’une navette ISS pour assister l’équipage. R2, conçu par General Electric, devient le premier « robonaute » de l’histoire spatiale. Continuer la lecture de Oceano robo
Demain, tous pilotes de robots !
Incubateur mythique fondé par Scott Hassan, Willow Garage s’est sabordé après une dizaine d’années de recherche active, convaincu des limites technologiques de sa vision d’une robotique totalement autonome. Parmi ses projets orphelins, Heaphy marque un tournant de la cobotique. Tim Field, son concepteur, constatant que malgré les avancées techniques, les capacités des robots autonomes ne permettaient pas l’exécution de tâches complexes et critiques pour le développement du marché, a proposé une approche radicalement nouvelle : au lieu de chercher à améliorer l’intelligence artificielle des robots, pourquoi ne pas plutôt se concentrer sur l’optimisation de fonctionnalités leur permettant d’être plus facilement assistés par l’intelligence humaine ? Continuer la lecture de Demain, tous pilotes de robots !

Robo techno stratégie
Les domaines de l’intelligence artificielle et de la robotique vont connaître une nouvelle accélération spectaculaire dans les cinq prochaines années par l’impact de deux annonces concomitantes cette semaine. Continuer la lecture de Robo techno stratégie
ROBO AFRICA
Depuis octobre 2013, le « roulage » au carrefour du Parlement, sur le boulevard Lumumba à Kinshasa n’est plus assuré par un policier. Un robot en aluminium de 2,50 mètres de haut régule la circulation d’une des artères principales de la capitale congolaise. Pivotant le buste qui passe du vert au rouge, il lève les bras comme un agent pour bloquer alternativement les voies. Continuer la lecture de ROBO AFRICA

Robots des villes et robots des champs
La robotique est associée à la vie urbaine. Pourtant un de ses marchés les plus prometteurs est l’agriculture. Le mythe du laboureur derrière sa charrue a beau persisté, la réalité est tout autre : les agriculteurs sont depuis bien longtemps des experts en matériels complexes susceptibles d’améliorer leur rendement et la qualité de leur production. Bien avant bon nombre de PME, ils ont intégré la technologie comme élément fondamental de leur compétitivité. Bienvenue à l’ère des robots agricoles ! Continuer la lecture de Robots des villes et robots des champs

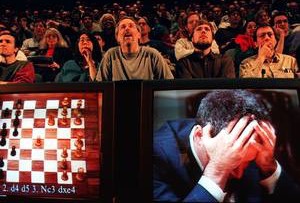
SINGULARITÉ 8/8 : combat de coq
L’affrontement des individus peut se faire de façon totalement aléatoire ou dans une enceinte définie en suivant des règles établies. Les individus sont alors normés dans leurs structures corporelles. Poids, tailles et autres caractéristiques physiques hors couleur de peau ou aspect du visage sont mesurés. L’humain semble dans cette action assez déterministe et précis. La théorie formelle de l’équilibre des forces doit conduire à un égalité parfaite des efforts en présence. Continuer la lecture de SINGULARITÉ 8/8 : combat de coq

SINGULARITE 7/8 : danser la vie
L’analyse séquentielle de vibrations musicales conduit à repérer des rythmes et des cycles superposés qui s’associent en harmoniques mathématiques. Sur ces bases, le corps des individus cherchent à reproduire par une gestuelle non définie ce qu’il identifie comme récurrent et répétitif. Les mouvements sont aléatoires ou codifiés et varient d’un individu à l’autre en fonction de ses caractéristiques physiologiques. Continuer la lecture de SINGULARITE 7/8 : danser la vie